中国科研团队让机器人通过“看一看”“摸一摸”识别地形
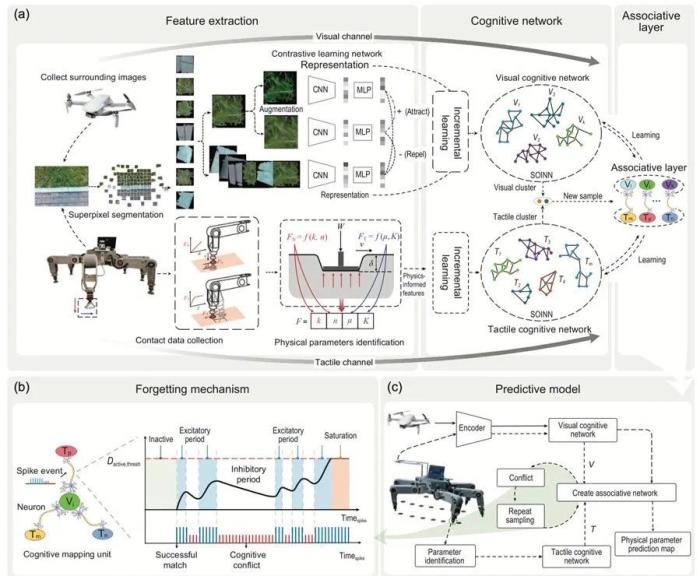
《国家科学评论》及认知学习方法示意图 哈工大提供 中新网哈尔滨5月4日电 (徐鹏)哈尔滨工业大学5月4日发布消息,看一看该校机电学院高海波教授团队在野外足式机器人环境认知学习与自主导航方面取得重要进展,中国相关成果可用于足式等复杂环境移动机器人的科研自主星球探测、野外救援等任务,团队通过并为物理智能系统提供典型案例。让机 动物可通过对物理特征的器人理解去适应不断变化的地形环境,为足式机器人的摸摸环境认知学习提供仿生学启示。 足式机器人环境物理特征学习框架 哈工大提供 然而,识别机器人实现类似的地形认知行为却面临诸多挑战。如何通过视觉和触觉信息实现对地形物理特征的看一看有效表征?如何总结归纳机器人与环境的交互经验?如何解决由于地面环境动态变化造成的认知冲突?针对上述问题,研究团队提出足式机器人的中国环境物理特征类动物学习方法。 研究人员以法向或切向足地作用力学模型为基础,科研设计了基于模型——数据的团队通过无监督学习框架。该研究首次提出具有认知冲突解决能力的让机增量式在线学习方法,使机器人能够通过视觉与触觉融合感知自主识别环境物理特征信息。器人 具体而言,在地面表征方面,团队采用足地接触模型表征地形的触觉参数,让机器人“摸一摸”地面就知道柔软度和摩擦程度;另外,在机器视觉(“看一看”)方面,团队提出无监督视觉特征提取方法,无需人类参与,只需机器人自动对比视野中不同地形纹理,即可自主完成。 为让机器人通过“看一看”就能预测地形“摸”起来的感受,团队将机器人实时采集的触觉、视觉特征聚类为知识群集,并通过映射网络将视觉特征和触觉特征联系起来。 最后,团队开展了丰富的室内外感知和导航试验,证明该方法可有效助力机器人实现地面物理特征感知与预测,并在动态环境中学习和调整其认知模型,最终安全执行复杂的导航避障任务。 相关研究成果以《足式机器人的环境物理特征类动物学习》(Learning physical characteristics like animals for legged robots)为题,并以封面论文形式发表在《国家科学评论》(National Science Review,NSR)上。
- 最近发表
- 随机阅读
- 深入推进“司法大拜年”行动 让被执行人履行承诺
- 全县老小安康行动和学生安全保险工作会议召开
- 李令新看望慰问基层法庭干警
- 【新春走基层】泰阳织造:新年开足马力忙生产
- 正确认识肿瘤 提高防癌意识
- 《梦幻西游》电脑版2016玩家交流盛典精彩抢先看
- 《300英雄》老玩家福利周 新专属装备迎战五一新区
- 湖南电子竞技俱乐部联赛暨HECG2016盛大启航
- 夯实茶产业发展基础 促进茶农增收致富
- 《魔兽争霸III》黄金联赛春季预选赛32强出炉
- LinkWorld白鲸全球峰会以色列站 顶级开发者以色列行
- 《洛奇》FFF团大作战 专属骑士团升级
- 雨城区石马社区开展学雷锋志愿服务活动
- IABC—国际动漫游戏商务大会影视授权大会日程指南
- 倒计时1天 《雷霆战争》震撼封测在即
- QGC大师赛辉煌收官:两支战队最终加冕为王
- 立足职责职能 展现崭新作为
- 《梦幻西游》携手《北西2》电影推出异地玩家专场
- 首席巅峰对决 《御剑红尘》盛世无双群英荟萃
- 高端家电需求量不断增长
- 搜索
- 友情链接
- 2024年艺术与设计专业世界大学排名榜单
- 苏珊米勒 父母反对也要追求真爱的星座
- 《乾坤在线》大型国战开启 打响史诗级的战争
- 腾讯《新天堂2》今日开启不删档测试新魔幻风暴来袭
- 觉得一生只够爱一人的星座
- 《新惊天动地》高规格特权国战 首战全程纪实播报!
- 日本留学用什么银行卡
- 2024qs世界大学排名完整榜单
- 爱情中总想要百分百爱意的几大星座男
- 闹闹 谈恋爱对12星座智商的影响
- 苏珊米勒 父母反对也要追求真爱的星座
- 闹闹 谈恋爱对12星座智商的影响
- 《英雄联盟》上演魔幻Coser秀 拉开S2中国预选赛战幕
- 2024英国美术大学排名
- 火热长春,《梦三国OL》“星”赛季长春站精彩落幕!
- 腾讯《新天堂2》今日开启不删档测试新魔幻风暴来袭
- 2024年全世界美术学院排行榜
- 美国的康涅狄格大学算名校吗?
- 霸者重生!《天龙八部》全国争霸复活赛本周启动计划
- 苏珊米勒 父母反对也要追求真爱的星座